1、APM 2.5 and 2.6
详细资料:http://copter.ardupilot.com/wiki/common-apm25-and-26-overview/
2、PX4FMU and PX4IO
PX4FMU详细资料:http://copter.ardupilot.com/wiki/common-px4fmu-overview/
PX4IO详细资料:http://copter.ardupilot.com/wiki/common-px4io-overview/
3、Pixhawk
详细资料:http://copter.ardupilot.com/wiki/common-pixhawk-overview/ Pixhawk飞控器是PX4的升级版本(也就是二代产品),包含了很多增强功能。
目前(2016年),Pixhawk飞控器已经推出第三代了。硬件电路更加复杂,冗余做的越来越多。 APM久经考验,性能发挥到淋漓尽致。但APM采用8位单片机,CPU性能和内存非常有限。 PX4FMU/PX4IO由瑞士团队开发,采用32位浮点运算CPU,大内存,IO微控制器分布式处理。PX4 / Pixhawk系统拥有10倍于APM的性能和内存。 Pixhawk将作为DIYDrones团队下一代飞控器标准。Pixhawk具备下一代飞控器的所有特点,而且还有大量升级空间。 APM非常优秀,在当前配臵下可以很好的满足要求,但是很快就会不再生产。
如果你现在手里已经有了Pixhawk飞控器,那么你就需要往里面下程序。一般购买回来,程序已经在里面了,不过如果你更新你的程序,那么你就要下载Arducopter固件。 固件:也就是飞控程序。 更新的版本,参考官方链接。 详细参考:
http://diydrones.com/forum/topics/arducopter-3-1-released?xg_source=activity
https://github.com/diydrones/ardupilot/releases/tag/ArduCopter-3.1.0
3.1版固件特性:
- Pixhawk support (Tridge & PX4 development team) 支持Pixhawk
- Autotune of Roll and Pitch gains (Leonard/Randy) Roll Pitch增益自动调节
- Drift mode (Jason) 漂移模式
- Improved Acro and new Sport mode (Leonard) 改进的Acro和运动模式
- Arming, Take-off, Land in Loiter or AltHold 悬停模式起飞、高度保持
- TradHeli improvements (Rob) including:
a) support for direct drive tail rotors 支持直接驱动尾旋翼
b) smoother ramp-up of main rotor 更流畅的主旋翼爬升性能
c) reduced collective for better control in stabilize mode (STAB_COL_MIN, STAB_COL_MAX params) 自稳模式 - Support for SingleCopter (Bill King) 支持单旋翼
- Performance improvements resolve AltHold troubles for Hexa & Octacopters 8\16旋翼悬停性能提升
- Safety Improvements:
a) GPS Glitch detection (Randy) 全球定位系统干扰检测
b) Motors spin when armed (Jonathan Challinger)
c) Crash detector shuts off motors if copter flipped for 2secs 坠机检测,翻转2秒关闭发动机。
d) batt failsafe option to RTL instead of LAND, gps failsafe option to trigger AltHold instead of Land
e) more pre-arm checks of inertial nav speed.
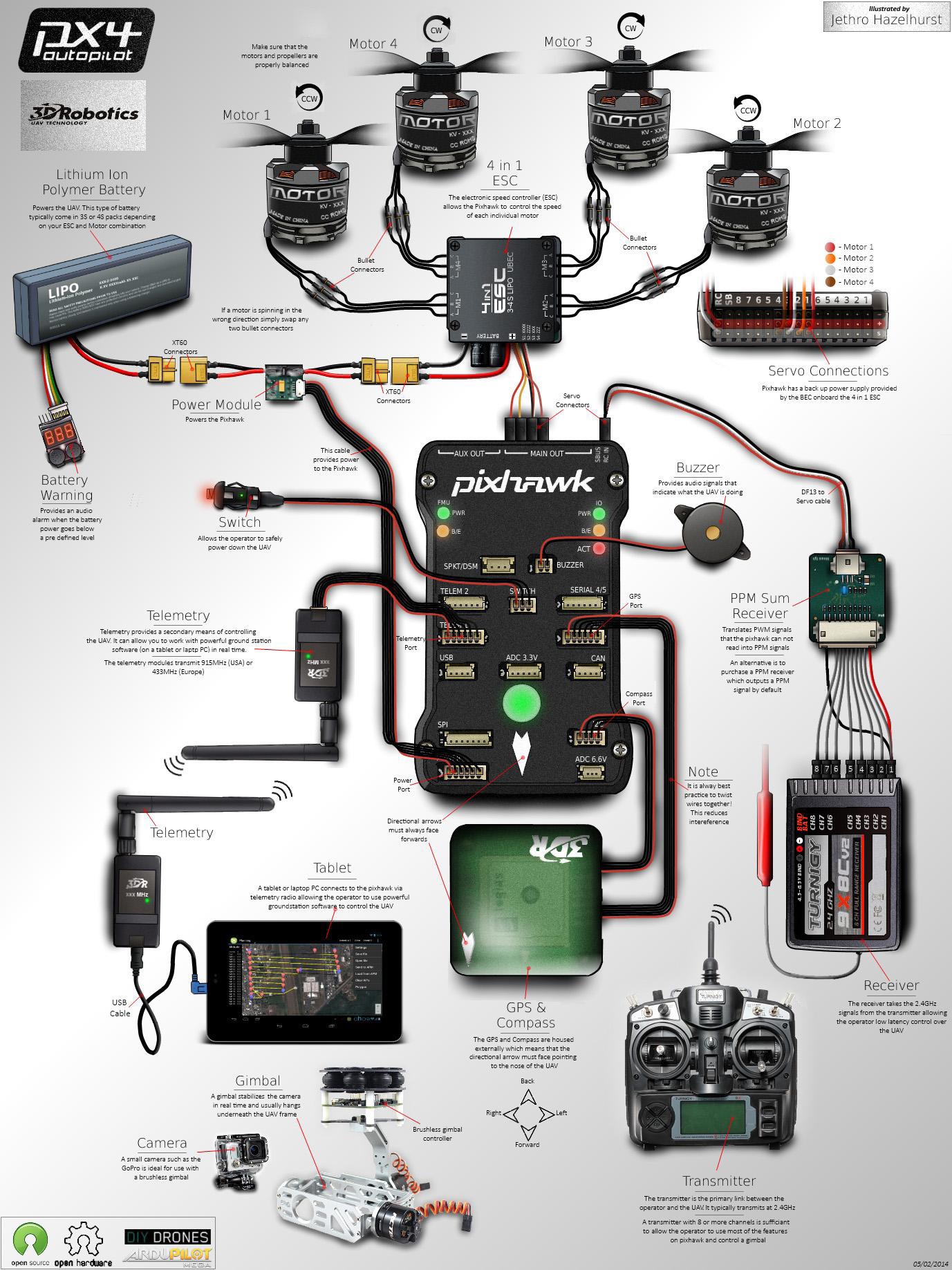
Pixhawk接线